
课题进度03
课题进度03
使用均方根误差(RMSE)来描述跟踪误差。
1. 已知目标的真实轨迹(理论分析/仿真时)
假设你在某一时刻 kk 对目标的位置估计值是,而目标的真实位置是
第一步:计算单点误差
该时刻的定位误差平方为:
第二步:计算累积后的均方根误差
如果你进行了 N 次独立的蒙特卡洛仿真,或者在某一时间段内有 N 个时刻的跟踪数据,那么位置均方根误差的计算公式为:
2. 不知道目标的真实轨迹(实际工程中)
在真实的水下跟踪场景中,我们往往无法知道目标的确切位置(如果知道了就不需要跟踪了)。这种情况下,我们无法直接使用上面的公式。此时,均方根误差通常被用来衡量滤波器输出本身的稳定性,即一致性。
在这种情况下,计算依据的是滤波器提供的协方差矩阵
第一步:提取协方差
卡尔曼滤波或粒子滤波在给出位置估计 的同时,还会给出一个协方差矩阵,它描述了滤波器对自己估计结果的“不确定度”。
对于二维位置,协方差矩阵通常长这样:
其中是 方向估计的方差,是方向估计的方差。
第二步:计算理论均方根误差
此时的均方根误差实际上是滤波器自己认为的理论精度:
在实际报告中,我们通常会取整个跟踪过程中 的平均值,或者画出它随时间收敛的曲线,来证明滤波器运行正常,且不确定度在逐渐降低。
3. 仿真结果分析
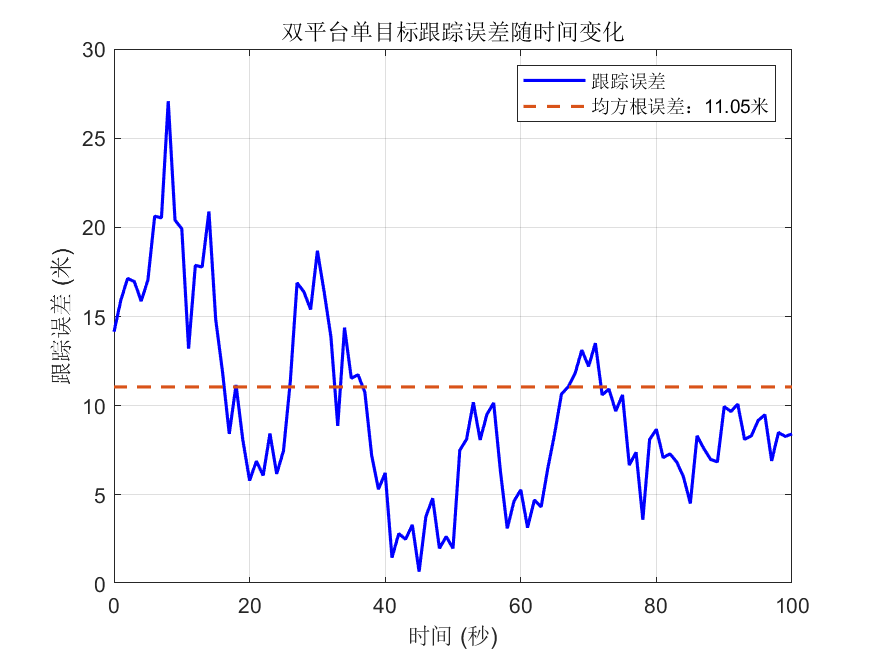
图1 位置误差

图2 速度误差
从图1中可以看出,在10s左右跟踪位置误差达到了最大,这是因为在前期目标与平台之间形成的方位角较大,导致跟踪精度较差。整体趋势是一个误差下降的过程。
从图2 中可以看出,在跟踪前期由于滤波器还没有足够的数据,导致跟踪误差较大,15s之后,随着新数据的加入,累积RMSE开始逐渐下降,反映了滤波器的收敛。
4. 全局RMSE和累计RMSE
全局RMSE:全局RMSE计算的是整个时间序列上位置误差的总体均方根值,是对所有采样点上的误差进行统计的结果。
累计RMSE:累计RMSE是从起始时刻到当前时刻,所有历史跟踪结果的误差的均方根值,随着时间的推进,累计RMSE会逐步更新。


