
课题进度04
课题进度04-滤波算法对比
1. 无迹卡尔曼滤波(Unscented Kalman Filter, UKF)
定义: 是一种适用于非线性系统的滤波算法,被看作是扩展卡尔曼滤波(EKF)的改进版本,解决了 EKF 在处理强非线性系统时的精度低或不稳定问题。
基本思想:
- UKF 的核心思想是使用一组经过精心选择的采样点(称为 sigma 点)来统计地近似非线性系统的传播特性,而不是像 EKF 那样通过一阶泰勒展开对非线性函数进行线性化处理。
- 这些 sigma 点经过非线性系统的传播后,UKF 使用这些点的加权求和来估计状态和协方差,而无需显式计算雅可比矩阵。
数学框架:
(1)状态模型
UKF 适用于如下的离散非线性系统模型:
- 状态转移方程:
- 观测方程: $\mathbf{z}_{k} = h(\mathbf{x}_k) + \mathbf{v}_k$
其中
$\mathbf{x}_k$是状态变量
$\mathbf{u}_k$是控制输入
$\mathbf{z}_k$是观测变量
$\mathbf{w}_k, \mathbf{v}_k$分别是过程噪声和测量噪声,假设是零均值高斯白噪声,协方差为$\mathbf{Q} 和 \mathbf{R}$
$f(\cdot)$和$h(\cdot)$是非线性状态转移函数和观测函数
2. 基于 Sigma 点的近似
UKF 的关键在于:用一组精心挑选的 sigma 点来捕捉状态均值$(\mathbf{x})$和协方差$\mathbf{P}$的非线性变化。
从当前状态的均值和协方差中生成 sigma 点集:
$\mathcal{X}0 = \mathbf{x}$
$\mathcal{X}{i} = \mathbf{x} + sqrt{(n+\lambda)\mathbf{P}{k-1}}$
$\mathcal{X}{i+n} = \mathbf{x} - \sqrt{(n+\lambda)\mathbf{P}_{k-1}}$
n 是状态维度,$\lambda$是缩放参数
用这些 sigma 点通过非线性函数 $f(\cdot)$和 $h(\cdot)$ 传播,根据传播后的 sigma 点重构新的状态均值和协方差。
3. UKF 的步骤
UKF 和 EKF 一样分为两个阶段:预测阶段和更新阶段。
(1)预测阶段:
使用 $f(\cdot)$ 和过程噪声协方差 ($\mathbf{Q}$) 来估计下一时刻的状态均值和协方差。
- 预测状态: $\hat{\mathbf{x}}k^- = \sum{i=0}^{2n} Wi \cdot f(\mathcal{X}{k-1}^i) $]
- 预测协方差: $\hat{\mathbf{P}}k^- = \mathbf{Q}_k + \sum{i=0}^{2n} Wi \left[f(\mathcal{X}{k-1}^i) - \hat{\mathbf{x}}k^-\right]\left[f(\mathcal{X}{k-1}^i) - \hat{\mathbf{x}}_k^-\right]^T$
(2)更新阶段:
使用观测函数 ($h(\cdot)$) 和观测噪声协方差 ($\mathbf{R}$) 来更新状态估计。
- 预测观测值: [ $\hat{\mathbf{z}}k = \sum{i=0}^{2n} W_i \cdot h(\mathcal{X}_k^{i,-}) $]
- 更新状态:
$\hat{x}{k}=\hat{x}{k}^{-}+K{k} \left( z{k}-\hat{z}_{k} \right)$
这里卡尔曼增益 ($\mathbf{K}k$) 为: [ $\mathbf{K}_k = \mathbf{P}{xz}\mathbf{P}_{zz}^{-1}$ ] 各项表示传播过程中的协方差。
4. 滤波算法对比
(1)匀速直线运动场景
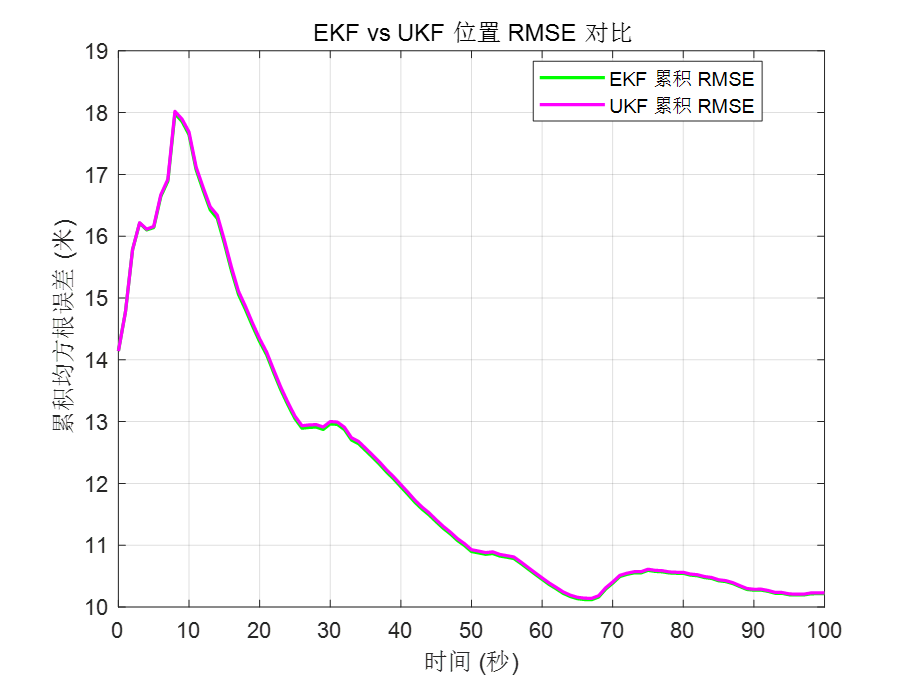
| 滤波算法 | RMSE/米 |
|---|---|
| EKF算法 | 11.061 |
| UKF算法 | 11.052 |
两种算法得到的跟踪误差几乎没有差别
原因:匀速直线模型的状态转移矩阵F为线性,因此预测步骤对于EKF和UKF完全相同,导致跟踪误差基本一致。
(2)匀速转弯运动场景


| 滤波算法 | RMse/米 |
|---|---|
| EKF算法 | 10.64 |
| UKF算法 | 9.98 |
可以看出在转弯场景下,UKF的跟踪误差比EKF的要小。
原因:转弯运动的非线性程度较强,由于UKF是用一些采样点来近似统计非线性系统的传播,所以对于非线性系统的效果更好。


